Approximate Steering of a Unicycle Under Bounded Model Perturbation Using Ensemble Control Aaron Becker 1:22 12 years ago 497 Скачать Далее
Ensemble Control of a Continuum of Nonholonomic Unicycles Aaron Becker 0:29 12 years ago 377 Скачать Далее
Controllable Omni-Wheeled Self Balancing Unicycle Sudarshan Samarasinghe 14:34 3 years ago 62 Скачать Далее
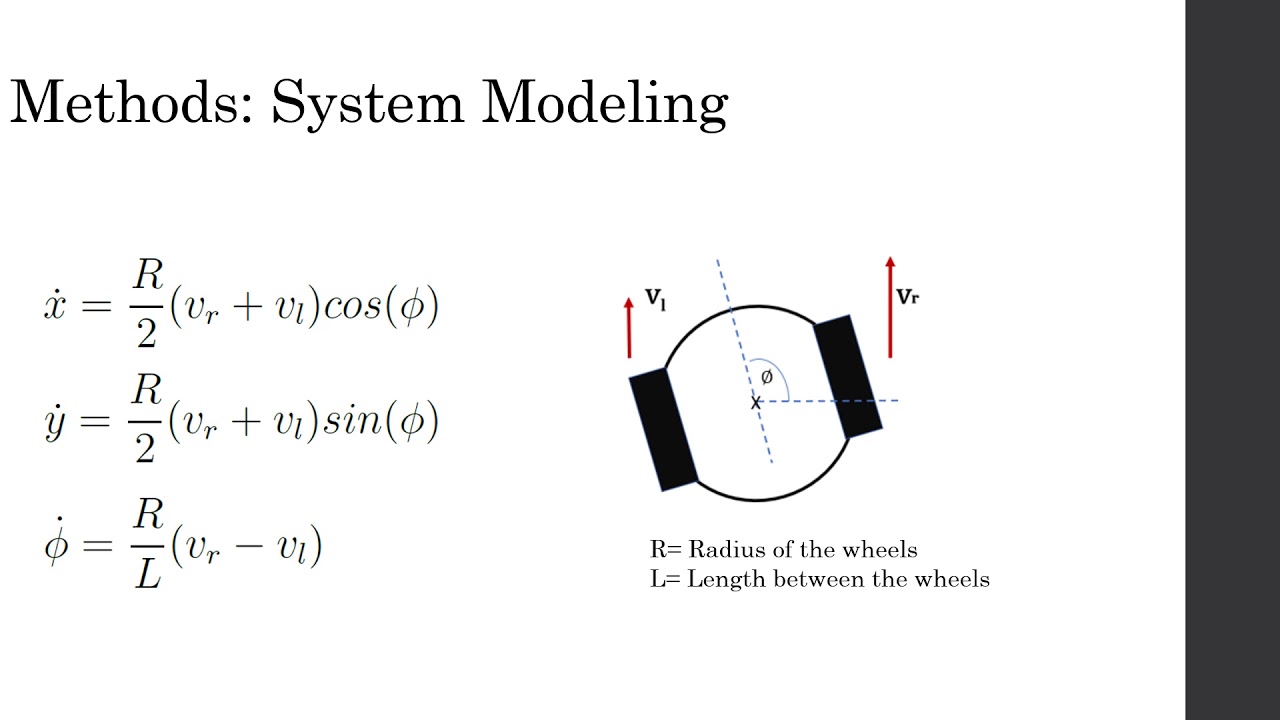
System Modeling: Path Tracking for Differential Steering Drive Autonomous Robots Computational Medicine Lab 4:37 4 years ago 10 919 Скачать Далее
Tensegrity Wheel for Active Drive Vehicle and Passive Drive Pushcart MikamiLab 2:02 12 hours ago No Скачать Далее
Exploring Mechanical Mechanisms: Principles and Real-World Applications#mechanicalengineering IT SOLUTIONS & TECHNOLOGY AI 1:36 2 hours ago No Скачать Далее
Uni-Cable-Cam morph #top #unicycle #how #shorts Terry UniGeezer Peterson 0:10 1 year ago 3 637 Скачать Далее